Partners involved

Tasks

Activities: GrowBot aims to achieve an energetic independence, becoming an autonomous system during its operation phase. We will develop autonomous MFCs that can provide energy to the robot and, in addition, do not require of a continuous monitoring of the cell conditions. Bioo’s objectives are: i) to have a cell that is easy to install, ii) that does not require of a continuous maintenance and iii) that is adaptable to non-wet lands. In order to achieve the objective described, different configurations for the MFC will be tested and adapted regarding to predominant plant species, soil pH, temperature, average humidity, organic matter and mineral salt composition. New electrode materials (combinations of polymers, metals, carbon) and surface treatments (i.e. doping with catalysts, new 2D materials, and functionalization with bacteria for on-demand activation) will be developed to improve their performance. Energy harvesting and storage will be established by considering low power harvesting technologies like tunnel FET and supercapacitors. Expected power densities are ~200 mW/m2.
Expected results: MFC’s that can be integrated in GrowBots and generate energy from the surrounding plants’ microbiome to recharge robots’ battery.

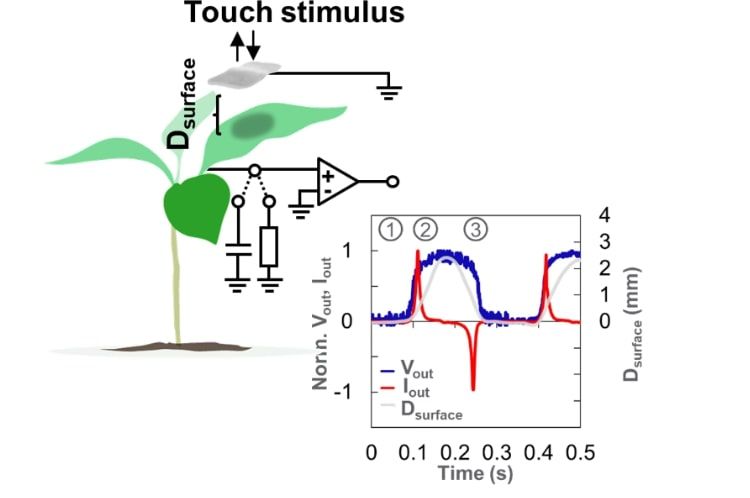
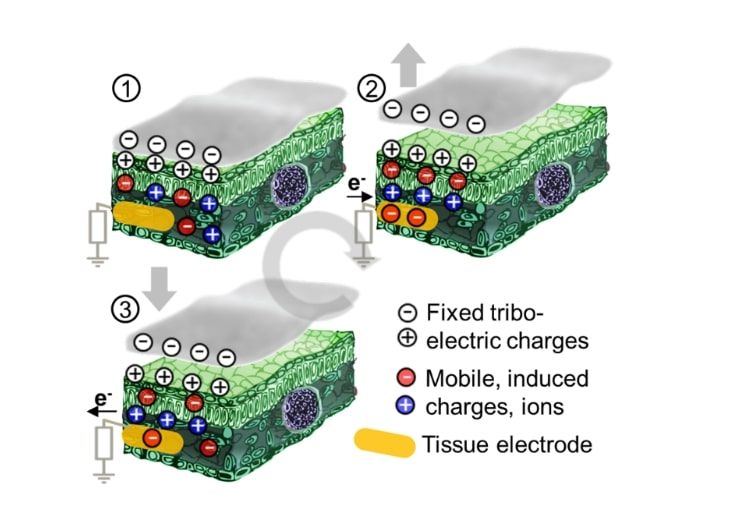
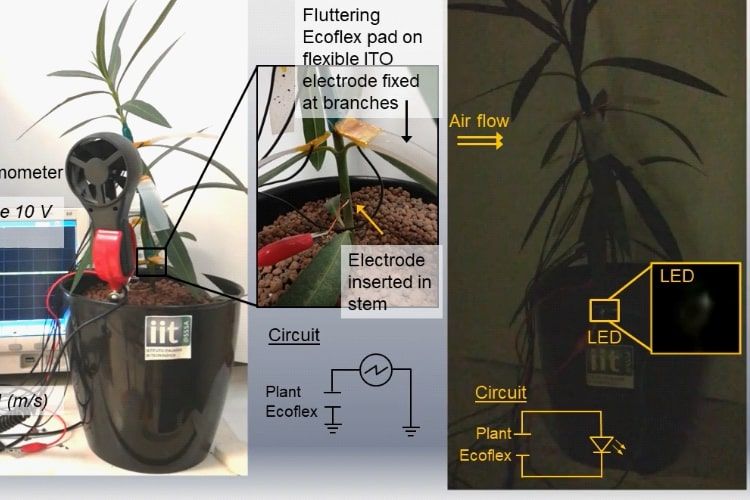
Activities: To implement the bio-hybrid harvesting based on triboelectric conversion occurring at plant leaves during mechanical stimulation (i.e. from wind and rain), modules consisting of two main components will be developed: 1. Minimal-invasive electrodes that establish electrical contact between GrowBots and real plants exploiting the electrical signalling network in natural plant’s. These will be based on soft electrodes that generate a conformal electrical contact with the outer plant surface connecting the inner tissue via multiple stomata in addition to invasive electrodes that penetrate the tissue directly. The electrodes will be tested in different species relevant for GrowBot-operating environments, along with energy extraction capability and impacts on plant viability. 2. Modules of flexible artificial “leaves” (flexible electrodes covered with tailored materials) assembled close to the interfaced plants will be developed to enhance mechanical impacts at the plant leaves and further enhance power output. The research will focus on tailoring the artificial leaf materials and their geometry for balancing impact force, frequency, energy output and plant viability. The materials will be analysed for their capability to generate triboelectric charges through transient multi-cycle contact with the leaves in the GrowBot environments (i.e. wind, rain, air- and water-flow etc.). Low power harvesting systems and energy storage will be adapted from task 7.3.
Expected results: Introduction of structures that generate energy from environmental mechanical as a decentralized energy source that can drive sensors in the GrowBots.
Gallery
MICROBIAL FUEL CELLS (MFCS) FOR TOPSOIL ENERGY HARVESTING [Bioo]
BIOHYBRID SYSTEMS FOR ENERGY HARVESTING (TRIBOELECTRICITY) [IIT]

Outcomes

Deliverables' List
MFC’s that can be integrated in GrowBots and generate energy from the surrounding plants’ microbiome to recharge robots’ battery.
Accepted (confidential)
Plant-GrowBot electrode interfaces for harvesting electrical signals from plant tissues.
Accepted (confidential)
Realease of artificial leaves able to harvest energy.
Accepted (confidential)